Демонстрация системы
Наземные платформы(скоро...)
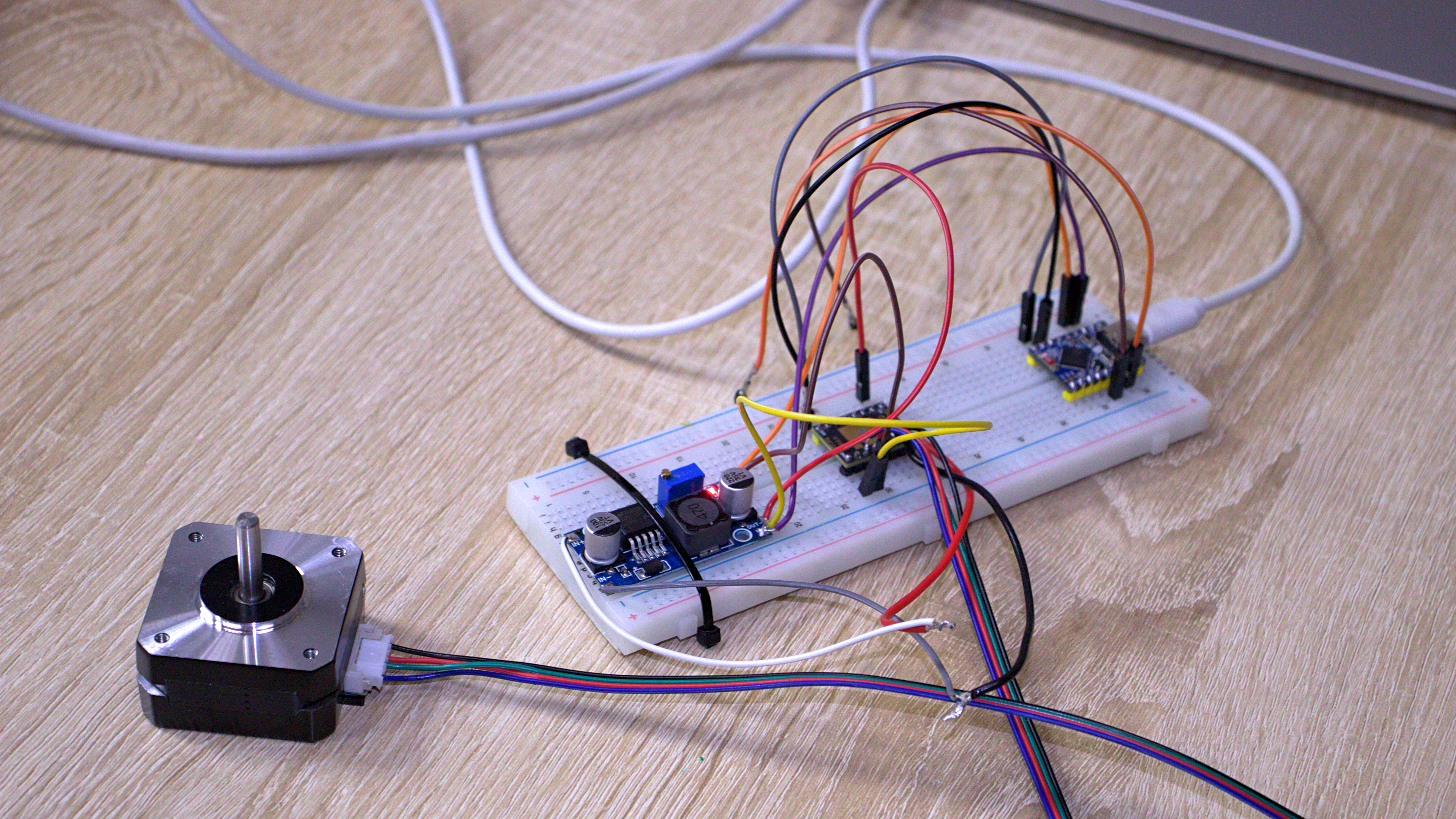
Сейчас отрабатываем технологию на наземных платформах (моделях-машинках), чтобы затем масштабировать её на беспилотные летательные аппараты.
Мы создаём программно-аппаратную платформу для синхронного управления группами автономных устройств и применяем её для световых дрон-шоу в залах.
Оператор загружает 3D-эскиз, а система автоматически распределяет роли между дронами, прокладывает безопасные траектории, учитывает профиль площадки и синхронизируется со звуком.
Цель — устойчивое и предсказуемое взаимодействие десятков движущихся объектов, чтобы готовить номера быстро и без ручной разметки.



Если вы хотите узнать больше о проекте или обсудить сотрудничество — свяжитесь с нами.